



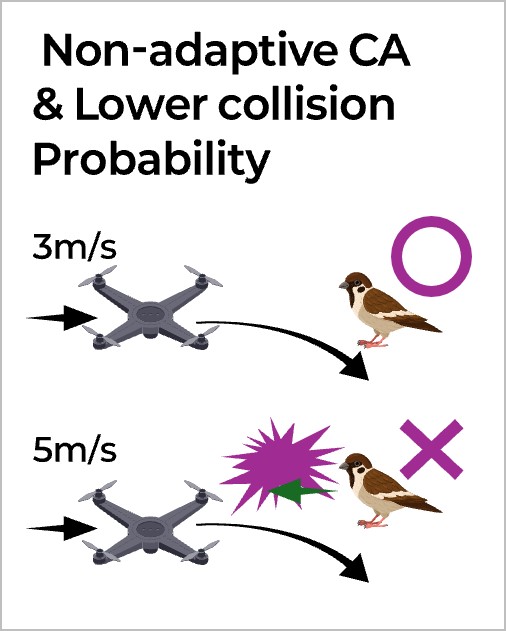
예측 충돌 시간 기반 적응적 충돌 회피
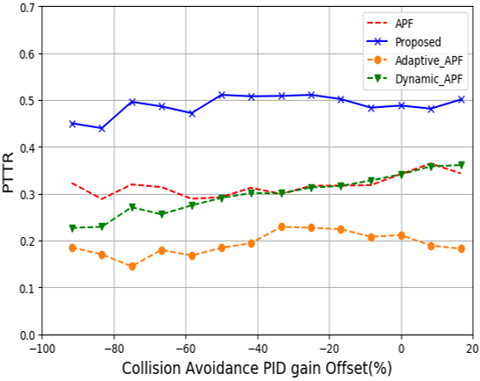
기존 충돌회피 알고리즘은 특정 속도에 해당하는 장애물에 대한 충돌 확률을 낮추는 데 초점을 두고 있음
현실은 다양한 속도의 장애물 존재
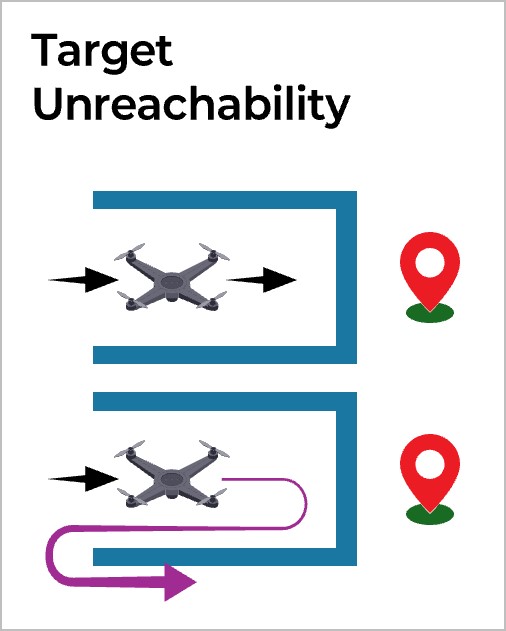
목표 도달 불가능 문제 해결
실시간 충돌 회피 알고리즘은 장애물에 의해 목표 지점에 도달하지 못하는 문제들이 존재
막힌 상황 인지 후 탈출하는 알고리즘 내재
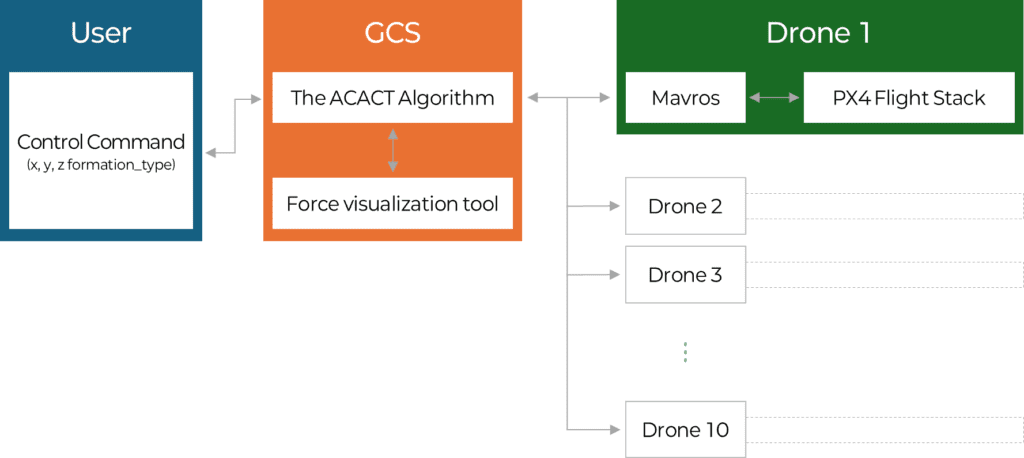
군집 드론을 위한 충돌 회피 알고리즘
기존의 충돌 회피는1대를 위함
군집 제어에서 사용 X

기존 충돌회피 알고리즘은 특정 속도에 해당하는 장애물에 대한 충돌 확률을 낮추는 데 초점을 두고 있음
현실은 다양한 속도의 장애물 존재
실시간 충돌 회피 알고리즘은 장애물에 의해 목표 지점에 도달하지 못하는 문제들이 존재
막힌 상황 인지 후 탈출하는 알고리즘 내재
기존의 충돌 회피는1대를 위함
군집 제어에서 사용 X
