




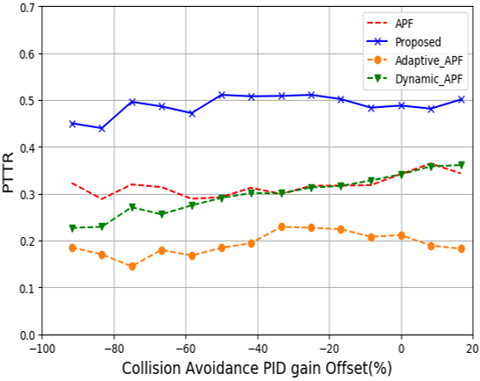
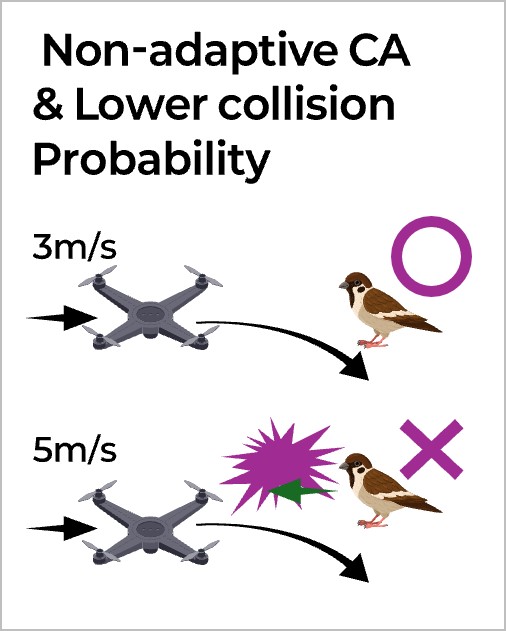
Adaptive Collision Avoidance Based on Predicted Collision Time
Traditional collision avoidance algorithms focus on reducing collision probability for obstacles moving at a specific speed. However, in real-world scenarios, obstacles exist at varying speeds.
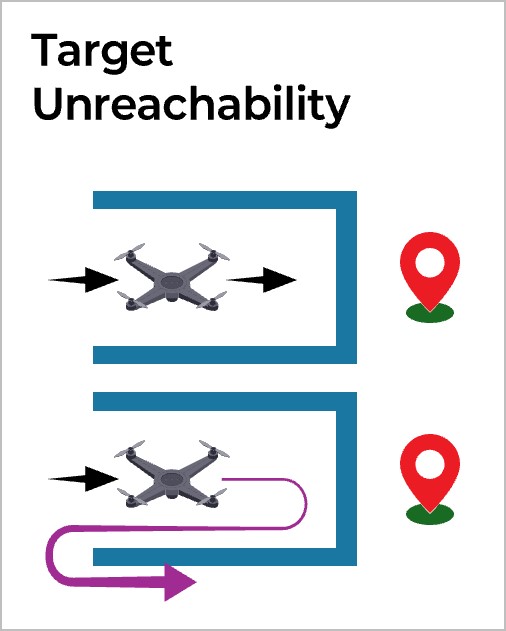
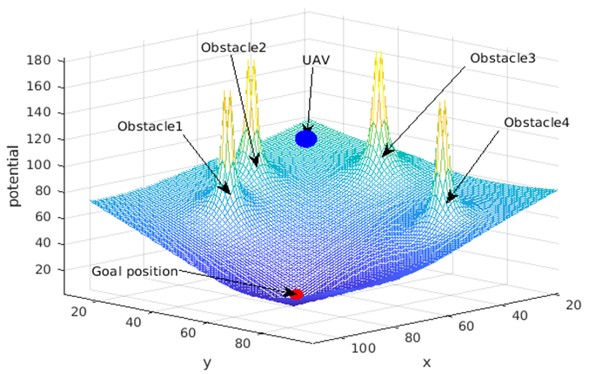
Solving the Problem of Unreachable Targets
Real-time collision avoidance algorithms often face challenges where obstacles prevent reaching the target destination.
Integrated Algorithm for Recognizing and Escaping Blocked Situations
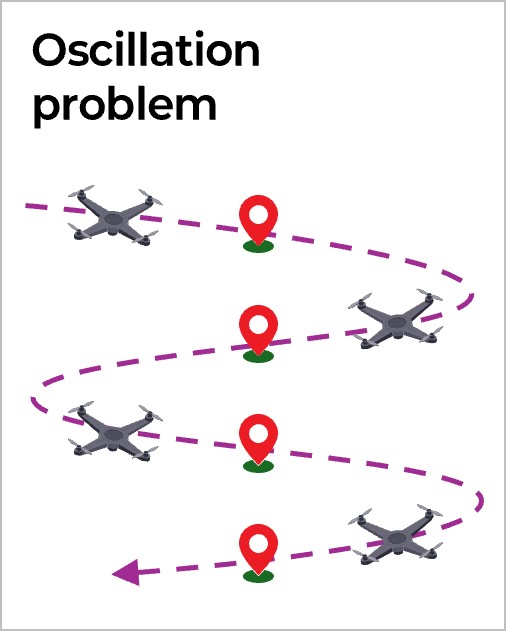
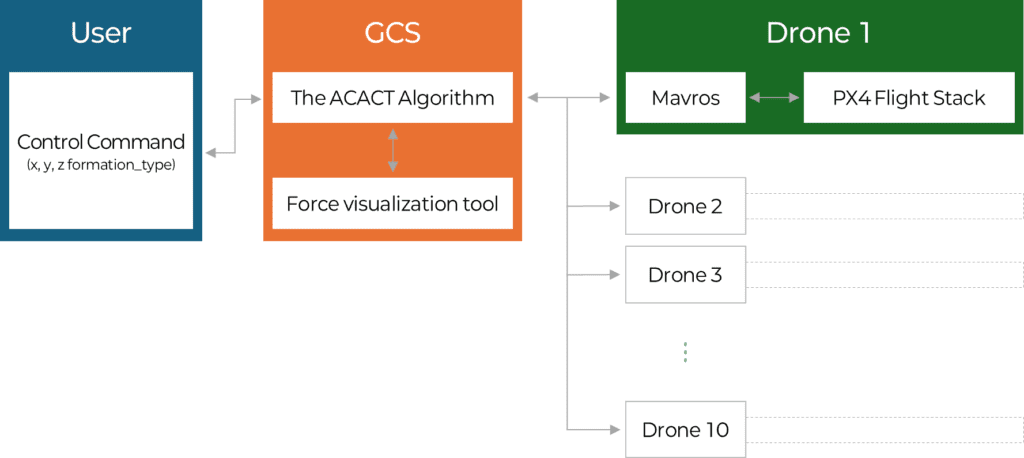
Collision Avoidance Algorithm for Swarm Drones
Traditional collision avoidance algorithms are designed for single drones.
Not Applicable to Swarm Control
